



合作客戶/
拜耳公司 |
同濟大學 |
聯合大學 |
美國保潔 |
美國強生 |
瑞士羅氏 |






相關新聞Info
靜電懸浮液態金屬高階振蕩頻率轉變和表面張力探測裝置
來源:西北工業大學 瀏覽 87 次 發布時間:2024-06-21
液態金屬振蕩階數轉變是物理學,材料科學與工程和空間材料科學等領域重要的課題。研究液態金屬振蕩階數轉變有利于揭示振蕩內在機制,探測表面張力等熱物理性質,對振蕩動力學和流體力學等研究領域具有重要促進作用。液態金屬振蕩階數轉變行為中承載了豐富的熱物理性質信息,蘊含著液態金屬振蕩階數、頻率等特征信息與表面張力等熱物理性質之間的相互作用關系。在控制液態金屬溫度等外界條件下,探究液態金屬振蕩階數轉變,對于研究液態金屬振蕩行為與熱物理性質的內在聯系和實現對液態金屬振蕩階數的主動控制具有重要意義。
靜電懸浮技術模擬了太空高真空和無容器的特性,能夠實現液態金屬在無接觸狀態下穩定懸浮和周期性振蕩,是研究液態金屬高階振蕩的重要科學技術。目前在實驗過程中觀察到了液態金屬二階和三階振蕩。見文獻:“Li,M.X.,Wang,H.P.,&Wei,B.(2019).Numerical analysis and experimental verification for heat transferprocess of electrostatically levitated alloy droplets.International Journalof Heat and Mass Transfer,138,109-116.”所述。然而,鮮有報道液態金屬振蕩階數轉變的研究,也缺乏對液態金屬高階振蕩狀態下表面張力等熱物理性質的探測。主要在于三種原因:首先是缺乏定量采集高階振蕩信號的裝置;其次是振蕩階數的轉變具有不確定性,難于預測。振蕩可能向更高階轉變也可能向低階轉變,這與液態金屬本身性質和懸浮加熱條件有關。再者,液態金屬振蕩頻率很高,振蕩階數轉變不易被捕捉,所以液態金屬振蕩階數轉變前后的振蕩頻率無法被及時采集到。
針對液態金屬振蕩信號采集問題,Bendert,J.C.等報道了一種采用豎直窄縫采集液態金屬二階振蕩光電信號的方法。該方法解決了液態金屬二階振蕩頻率等振蕩信號無法被實時、定量和準確地采集的問題。通過振蕩頻率推導出了液態金屬的表面張力和粘度等熱物理性質。但是,該方法僅對采集液態金屬二階振蕩信號準確有效。由于液態金屬三階、四階、五階等高階振蕩形態不同于二階振蕩形態,并非沿著豎直窄縫做周期往復振動,所以豎直窄縫的光電探測設備無法被用于采集高階振蕩信號及其轉變。
液態金屬振蕩階數轉變是在連續幾個振蕩周期內完成的,十分迅速。針對液態金屬振蕩階數轉變無法被捕捉的問題,本團隊公開了采用高速CMOS相機攝取液態金屬振蕩階數轉變的方法。見文獻:“Li,M.X.,Wang,H.P.,Zheng,C.H.,Wang,Q.,&Wei,B.(2023).A videographic and numerical study of nonisothermal oscillationprocess for electrostatically levitated liquid Nb-Si alloy.InternationalJournal of Thermal Sciences,187,108197.”所述。該方法通過高速CMOS相機拍攝圖像記錄液態金屬振蕩過程,成功獲取到了液態金屬從二階振蕩轉變為三階振蕩的圖像。但是,高速CMOS相機每秒拍攝上千幀圖像,且振蕩信息采集過程需要幾分鐘,可見實驗最終數據的采集量很大。并且,液態金屬振蕩分析結果依賴于對拍攝數據的后續處理,這不僅使實驗研究滯后而且導致數據處理量大、實驗分析效率低。高速CMOS相機價格昂貴,這增加了實驗測試的成本。此外,采集到的液態金屬振蕩圖像一般不具有豎直對稱性,振蕩圖像對稱軸與豎直線之間通常有一個夾角。即使采用豎直窄縫的光電探測方法采集液態金屬二階振蕩信息,振蕩振幅會明顯小于液態金屬真實的振蕩振幅,這增加了信號采集的誤差。
具有豎直窄縫的光電探測方法無法有效探測液態金屬高階振蕩行為,基于靜電懸浮系統的高速攝像機無法實時定量的獲取液態金屬高階振蕩轉變信息。目前并沒有能夠實時、完整和準確的探測液態金屬高階振蕩轉變的方法。液態金屬在高階振蕩過程中的表面張力等熱物理性質難以獲取。
靜電懸浮液態金屬高階振蕩頻率轉變和表面張力探測裝置的搭建:
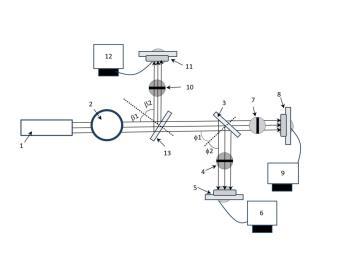
圖中:1?定位激光器,2?靜電懸浮裝置,3?第二分束鏡,4?第三光闌,5?第三光電探測器,6?第三處理器,7?第二光闌,8?第二光電探測器,9?第二處理器,10?第一光闌,11?第一光電探測器,12?第一處理器,13?第一分束鏡,14?圓型外框,15?支撐桿,16?底座,17?刻度線,18?圓型的遮光板,19?螺紋,20?探測間隙。
由定位激光器1、靜電懸浮裝置2、第一分束鏡13、第一光闌10、第一光電探測器11、第一處理器12、第二分束鏡3、第二光闌7、第三光闌4、第二光電探測器8、第三光電探測器5、第二處理器9和第三處理器6組成,如圖1所示。
定位激光器1與靜電懸浮裝置2之間的距離為20厘米。第一分束鏡13與靜電懸浮裝置2之間的距離為10厘米。第一光闌10與第一分束鏡13之間的距離為5厘米,第一光闌10與第一光電探測器11之間的距離為5厘米。入射光與分束鏡法向之間的夾角為,分束鏡法向與反射光之間的夾角為。,。
第一分束鏡13與第二分束鏡3之間的距離為5厘米,第二光闌7與第二分束鏡3之間的距離為5厘米,第二光闌7與第二光電探測器8之間的距離為5厘米。第三光闌4與第二分束鏡3之間的距離為5厘米,第三光闌4與第三光電探測器5之間的距離為5厘米。入射光與分束鏡法向之間的夾角為,分束鏡法向與反射光之間的夾角為。,。
第二處理器9與第二光電探測器8相連;第三處理器6與第三光電探測器5相連;第一處理器12與第一光電探測器11相連。所述定位激光發射端1、懸浮液態金屬、第一分束鏡13、第二分束鏡3、第二光闌7和第二光電探測器8在同一水平線,并且同圓心;第二分束鏡3、第三光闌4和第三光電探測器5在定位激光反射線上,在同一水平線上。第一分束鏡13、第一光闌10和第一光電探測器11在定位激光反射線上,在同一水平線上。
靜電懸浮液態金屬高階振蕩頻率轉變和表面張力探測裝置的探測過程,定位激光器1發射的光線透過靜電懸浮裝置2的真空玻璃打在懸浮液態金屬上。激光穿過懸浮液滴從靜電懸浮裝置另一側的真空玻璃穿出。穿出的定位激光被兩個分束鏡分成三束。激光首先打在第一分束鏡13上,反射光線與法線的夾角為。反射光線通過第一光闌10的探測間隙被第一光電探測器11接收。透過第一分束鏡13的光線射在第二分束鏡3上。反射光線與法線的夾角為。反射光線打在第三光闌4的探測間隙上,信號被第三光電探測器5接收;透過第二分束鏡3上的光線打在第二光闌7的探測間隙上,信號被第二光電探測器8采集。
第一光闌10、第二光闌7和第三光闌4均包括底座16、支撐桿15、圓型外框14和圓型的遮光板18。圓型底座的直徑為4厘米,高度1厘米。柱狀支撐桿的直徑為1厘米,高度10至20厘米,優選地,高度14厘米。所述圓型外框14以其圓心為圓點,在其表面刻有720個從0度至360度的刻度線17,每格刻度線間距為0.5度。圓型外框的外徑為10至8厘米,內徑為9至5厘米,優選地,圓型外框的外徑為8厘米,圓型外框的內徑為7厘米。所述遮光板18與圓型外框14通過螺紋19連接。遮光板的外徑在9至5厘米之間,厚底為為0.5至1厘米,優選地,遮光板的直徑為7厘米,厚度0.3厘米。遮光板可以通過螺紋19相對于圓型外框轉動。遮光板中心設有探測間隙20,探測間隙20的形狀和尺寸依據液態金屬尺寸參數設置。
總結:
靜電懸浮液態金屬高階振蕩頻率轉變和表面張力探測裝置及方法。突破了當下僅用豎直窄縫探測液態金屬二階振蕩的現狀,實現了對液態金屬三階和四階等高階振蕩的探測。通過探測液態金屬高階振蕩的頻率等振蕩信息,能夠計算液態金屬在高階振蕩狀態下的表面張力等熱物理性質。